Python PLC Systems AI & IoT SolidWorks Arduino Raspberry Pi Python PLC Systems AI & IoT
MY STORY
Who Am I?
Hello, I am Hasan Can Uysal. I am 21 years old and
currently an
undergraduate student in the Department of
Aerospace Engineering at
Necmettin Erbakan University.
While my engineering education provides me with a strong technical
foundation,
what truly defines me is my endless curiosity and
passion for creation. For me, identifying a problem,
contemplating it, and designing a solution from scratch
is not just a task; it is a way of life that feeds my mind
and spirit.
This adventure, which began in my childhood, has evolved into a
professional journey of development where I build
complex systems, learn something new every day,
and constantly push my own limits.
I do not view technology merely as circuits, code, or metal structures.
I define engineering as the art of transforming an abstract idea
into a tangible benefit that touches human lives.
My greatest motivation in my R&D endeavors is to use my
technical competencies to build
functioning, living systems that create real
value. I believe that even the most
complex project remains incomplete if it does not
facilitate human life or solve a
meaningful problem.
I approach every new project with the question,
"How can I make this better, more efficient, and more accessible?"
In this process, I not only deepen my technical skills but also
broaden my vision.
I aim to use my technical knowledge not just to be a part of
industrial production, but to produce
innovative and human-centric solutions.
My dream for the future is to leave a mark as an engineer dedicated to
solving universal problems in a world where
boundaries are overcome by technology.
This blog is a record not only of my projects but also of my
intellectual evolution as an engineer, the
experiences I have gained, and my
unceasing determination to learn on the path to building a
better future.
FLAGSHIP PROJECT
Project T.A.R.I.K.
AI & IoT Assistant
Personal Life & Business life Assistant
TARIK is an AI-powered personal and business assistant designed as a
research-oriented smart system. Built on a
Linux-based Raspberry Pi and ESP32 architecture, it integrates artificial intelligence, embedded
systems, and
human–machine interaction into a single platform. TARIK
combines voice control, a touchscreen interface, and a web-based
control panel to manage smart environments, productivity tools, and data-driven applications,
making it a scalable and
academically valuable experimental system.
PORTFOLIO
Other Projects
Flight Simulation Rig
A compact simulation platform built with Arduino-based controls and SolidWorks-designed
mechanical parts.
Industrial Manual Milling Machine
A precision-focused machine concept with rigid structure and practical workshop-oriented
design decisions.
Automatic Wire Cutting Automation
A production-oriented automation concept that improves speed, consistency, and repeatability
for cable processing.
N.S.R. (Native Study Resource)
An innovative language acquisition application donated to Assist. Prof. Dr. Şeyda Yıldırım to optimize
English preparatory education.
Contact
TARIK — AI Assistant
TARIK is an AI-powered personal and business assistant
developed as a comprehensive, research-oriented smart system that combines
artificial intelligence, embedded hardware, and
human–machine interaction within a single unified architecture.
The project was designed not as a conventional virtual assistant, but as a
fully integrated cyber–physical system capable of interacting
with both digital services and physical environments.
Built on a Linux-based Raspberry Pi platform and supported by
ESP32 and ESP32-CAM microcontrollers, TARIK
integrates real-world device control, data-driven decision-making, and
intelligent automation. The system incorporates a
7-inch touchscreen display, a built-in microphone, and a
built-in speaker, enabling direct, standalone interaction without the need
for external peripherals. In addition, Pi Camera (v1.3) and
ESP32-CAM modules provide visual perception and monitoring
capabilities, extending TARIK’s functionality beyond purely software-based
intelligence.
TARIK is designed as a modular and scalable platform where
artificial intelligence is not isolated from hardware, but deeply embedded
into the physical system. Through voice commands, touch-based interaction, and
a web-based control panel, the system allows users to manage
smart environments, production tools, personal data, and business workflows
in a centralized manner. From an academic perspective, TARIK
serves as an experimental platform for studying
embedded AI systems, human–computer interaction,
smart automation, and real-world system integration, making it
suitable for university-level research, project-based learning,
and international academic collaboration.
System Architecture & Conceptual Design
TARIK is designed as a research-oriented cyber–physical AI system rather than a conventional
virtual assistant.
Its architecture combines software intelligence and physical actuation into a single coherent
platform.
The system follows a local-first and offline-capable design philosophy, prioritizing
reliability, privacy,
and independence from continuous cloud connectivity.
This approach makes TARIK suitable for experimental environments, academic laboratories,
and long-term research deployments.
Hardware Infrastructure & Embedded Systems
The core of the system is powered by a Raspberry Pi 5, acting as the central processing and
orchestration unit.
Real-time hardware interactions are delegated to ESP32 and ESP32-CAM microcontrollers,
forming a distributed embedded system architecture.
This separation allows high-level AI processing to coexist with low-latency hardware control,
reflecting modern industrial and IoT system design principles.
Artificial Intelligence & Voice-Based Interaction
TARIK incorporates continuous voice interaction through wake-word detection,
speech recognition, and natural language processing.
The system supports bilingual operation (Turkish and English) and enables hands-free control
of both digital services and physical devices.
Speech synthesis provides immediate auditory feedback,
enhancing usability and human-centered system interaction.
Human–Computer Interaction (HCI) Framework
The system employs a multi-modal HCI framework,
combining a 7-inch touchscreen, physical audio input/output,
and a web-based control interface.
This design enables users to interact with TARIK through voice,
touch, and remote browsers,
making the platform suitable for usability testing,
interface evaluation, and interaction design research.
Smart Environment & Physical Control Systems
TARIK functions as a centralized smart environment controller,
capable of managing lighting systems, LED strips, DC motors,
curtains, relays, and MOSFET-based power circuits.
The system bridges digital commands with physical actuation,
demonstrating practical cyber–physical integration.
Visual Perception & Security Monitoring
Visual input is provided through Pi Camera and ESP32-CAM modules,
enabling live monitoring, image capture, and remote observation.
These features allow TARIK to act as a basic perception system,
extending its intelligence beyond purely auditory interaction.
Network Architecture & Secure Remote Access
Remote connectivity is implemented using VPN-based solutions such as Tailscale,
ensuring encrypted communication and secure external access.
This approach avoids direct public exposure
while maintaining global accessibility for research
and demonstration purposes.
Media Control & External API Integration
TARIK integrates external APIs, most notably Spotify,
allowing voice-controlled media playback,
playlist navigation, and real-time user feedback.
This demonstrates practical API usage
and service orchestration within embedded systems.
Personal Productivity & Cognitive Assistance
The system supports reminders, daily activity logging,
study progress tracking (vocabulary, reading, speaking),
and personalized information summaries.
TARIK acts as a cognitive assistant designed to augment
daily decision-making and learning processes.
Business Logic & Data Management
TARIK provides structured data management using SQLite
and Excel-based databases, supporting inventory tracking,
project monitoring, and analytical reporting.
All data is stored locally,
ensuring privacy and transparency.
Manufacturing & 3D Printing Integration
The system enables remote management of a 3D printer,
including power control, job execution,
progress monitoring, and operational feedback.
This feature highlights TARIK’s applicability
in digital fabrication and smart manufacturing environments.
Software Engineering & Modularity
TARIK’s software stack is developed in Python,
utilizing a Flask-based modular architecture.
This structure allows independent feature development,
academic experimentation,
and long-term scalability.
Academic & Research Relevance
From an academic perspective,
TARIK serves as a hands-on experimental platform
for embedded AI, human–computer interaction,
cyber–physical systems,
and smart automation research.
Scalability & Future Research Potential
The system is designed to support future hardware modules,
software services,
and collaborative international research projects,
making it suitable for long-term academic evolution.
...
This project represents a divergence from conventional simulation controllers by offering
mechanical realism, high-resolution actuation, and
interoperability with standardized simulation platforms.
Designed as a fully functional engineering prototype, it merges mechanical design,
embedded systems, and control engineering into a unified interface,
aiming to bridge the gap between digital simulation environments and
tactile user feedback through a custom-engineered hardware interface.
The core objective was to design a modular,
high-precision input system that surpasses the limitations of standard
off-the-shelf controllers. By leveraging the principles of
additive manufacturing and
open-source firmware architecture, this project demonstrates how
accessible hardware can be transformed into
professional-grade avionics or automotive simulation equipment.
It is not merely a controller; it is an exploration of kinematic precision and
human–computer interaction (HCI).
Gallery (Placeholder)
1. Kinematic & Mechanical Design
Gear-Driven Transmission System:
Utilizes a custom-engineered 33-tooth involute gear mechanism to transmit steering torque.
This reduction
system enhances angular resolution closer to the potentiometer's physical limits, providing
finer control
granularity than direct-drive counterparts.
Tribologically Optimized Linear Sliders:
The Y and Z axes feature a "Slider & Plug" architecture designed with specific tolerances to
minimize
kinetic friction while eliminating mechanical backlash (play). This ensures smooth pedal
actuation for
throttle and brake inputs.
Structural Modularity:
The assembly is built on a reinforced "Main Body" (Ana Gövde) chassis with modular
attachment points. The
Z-axis includes an extendable shaft design, allowing for future mechanical upgrades or
ergonomic adjustments
without redesigning the core system.
DFM (Design for Manufacturing) Approach:
All components, from the steering shaft holders to the potentiometer brackets, are optimized
for Fused
Deposition Modeling (FDM), demonstrating efficient rapid prototyping techniques with high
structural
integrity.
2. Electronic Architecture
High-Resolution Signal Acquisition:
Powered by the ATmega32U4 microcontroller, the system employs a 10-bit Analog-to-Digital
Converter (ADC),
translating physical displacement into 1024 discrete digital steps per axis. This eliminates
"stepping"
artifacts common in low-resolution controllers.
Noise-Isolated Sensor Mounts:
Custom-designed "Potentiometer Holders" rigidly secure the 10K sensors, preventing
mechanical vibration from
inducing signal noise or jitter during aggressive simulation scenarios.
Driverless HID Integration:
Operates as a compliant Human Interface Device (HID) over USB 2.0. The device requires no
proprietary
drivers, ensuring immediate compatibility with Windows, Linux, and macOS environments
(Plug-and-Play).
3. Firmware & Control Logic
Advanced Signal Filtering (MMJoy2):
The firmware layer incorporates real-time signal processing algorithms. Users can define
custom response
curves (linear, exponential, or logarithmic) and adjustable dead-zones to calibrate the
controller's
sensitivity profile to their specific driving style.
High-Frequency Polling Rate:
Optimized for low-latency transmission, ensuring that steering inputs are registered and
processed by the
simulation engine with millisecond-level precision.
Non-Volatile Memory Storage:
Calibration data and axis configurations are stored directly on the microcontroller's
EEPROM, preserving
settings even when disconnected or moved to a different workstation.
PROJECT DETAILS
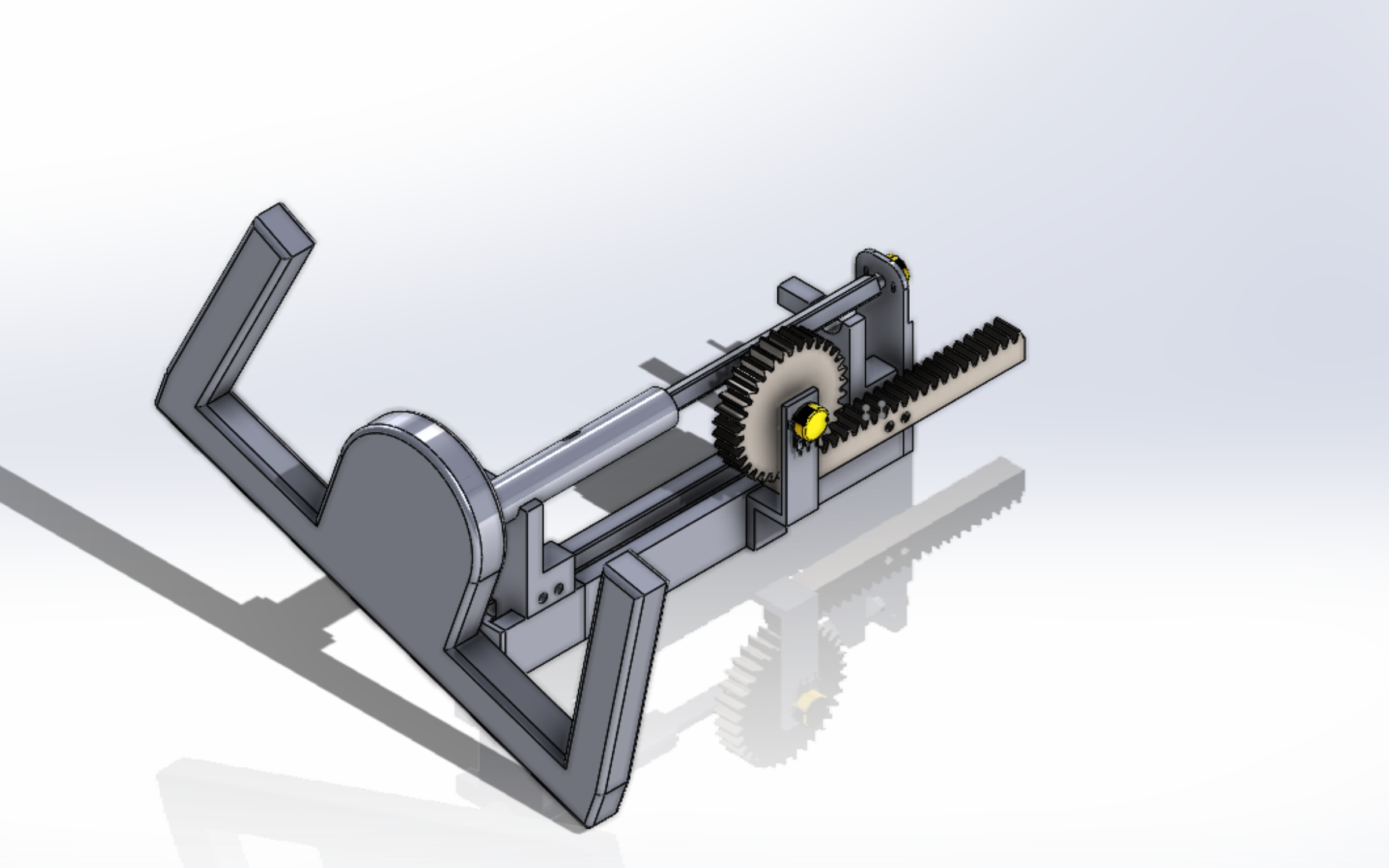
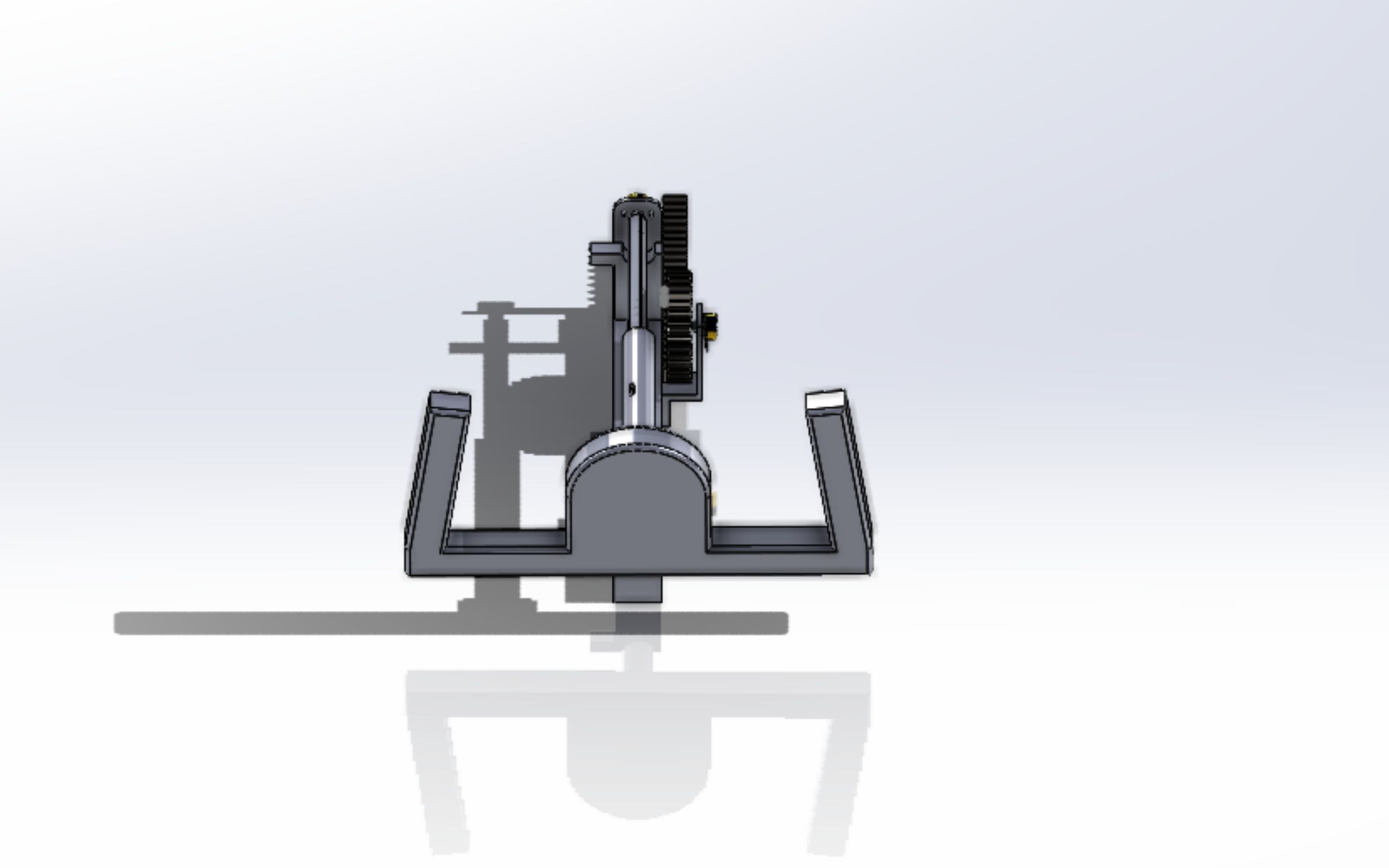
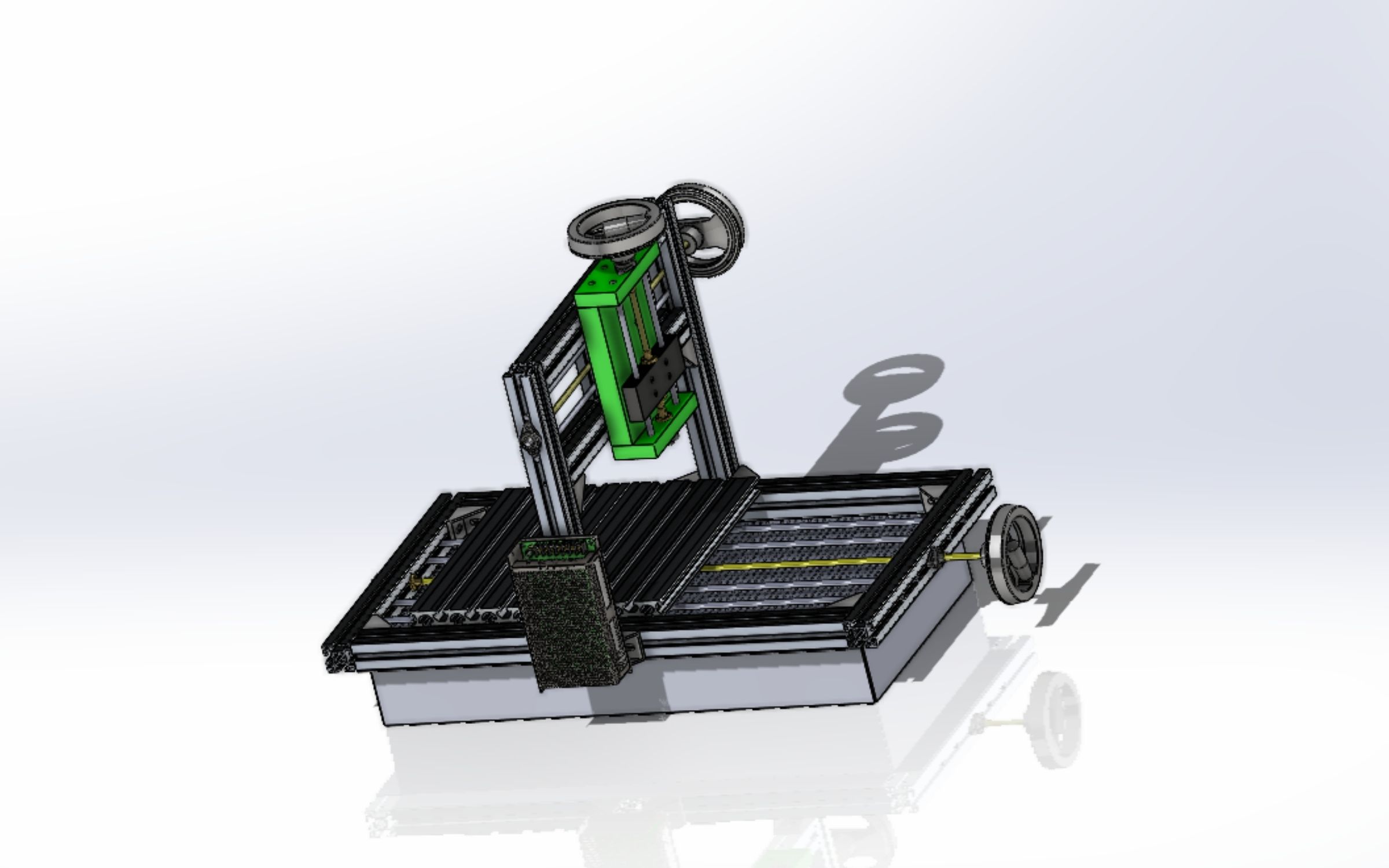
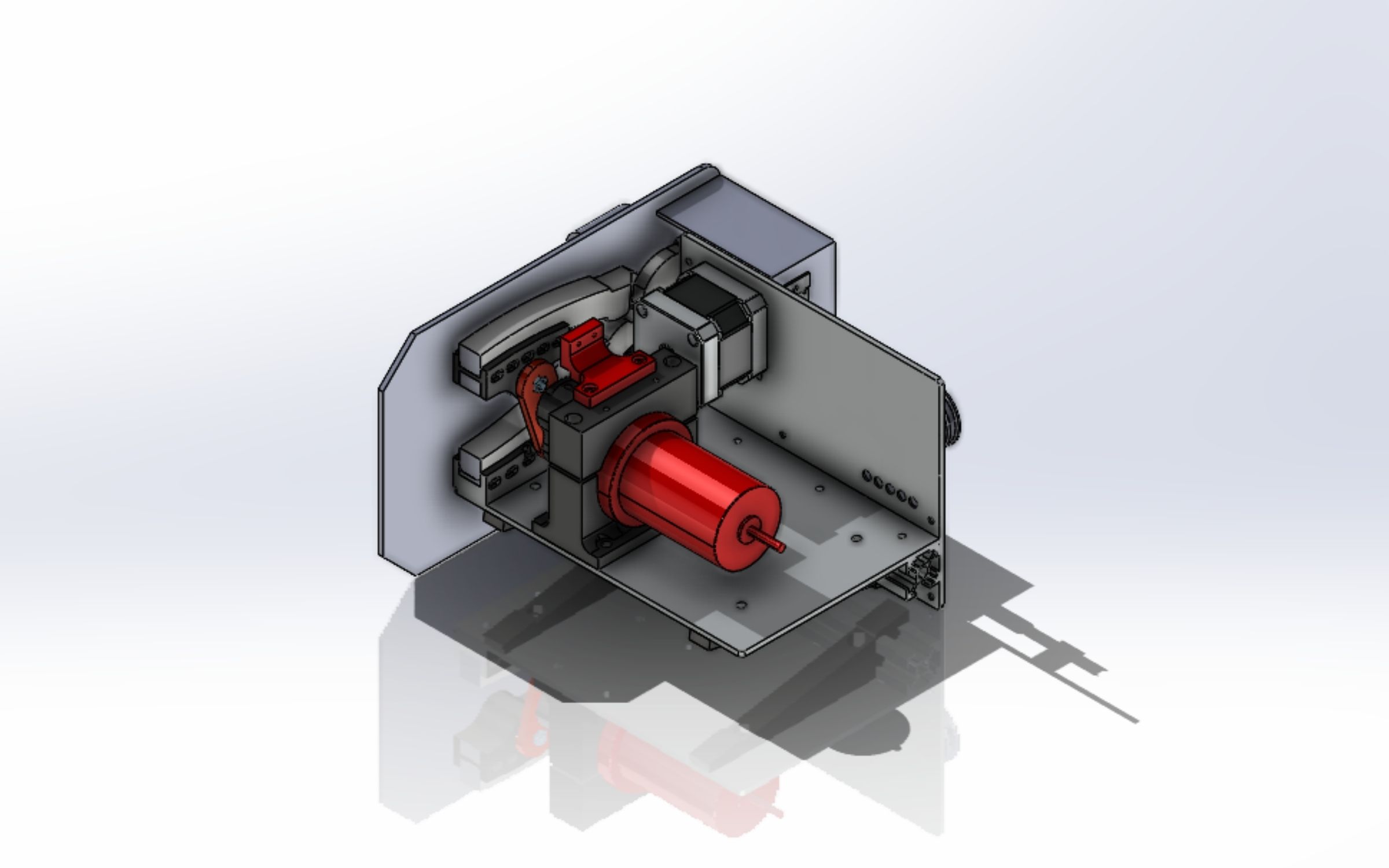
Industrial Manual Milling Machine
1. Executive Summary and Systematic Introduction
The submitted CAD documentation illustrates the mechanical design of a robust Desktop Vertical Milling
Machine chassis, engineered to facilitate precision subtractive manufacturing operations such as
drilling,
end-milling, and surface grinding. The structural core is constructed using 40x40mm and 40x80mm Aluminum
Sigma Extrusions, forming a rigid "C-Frame" column architecture that effectively neutralizes cutting
forces
and minimizes deflection during operation.
The kinematic system employs a Trapezoidal Lead Screw Mechanism to drive the Z-axis carriage, converting
rotary input into linear vertical feed.
A distinctive feature of this design is its Dual-Mode Actuation
Interface, which allows for both manual tactile control via a handwheel and automated feed via a DC
motor
integration. This hybrid approach renders the machine highly versatile, suitable for both rapid
prototyping
applications requiring manual finesse and consistent, automated machining cycles.
Gallery (Placeholder)
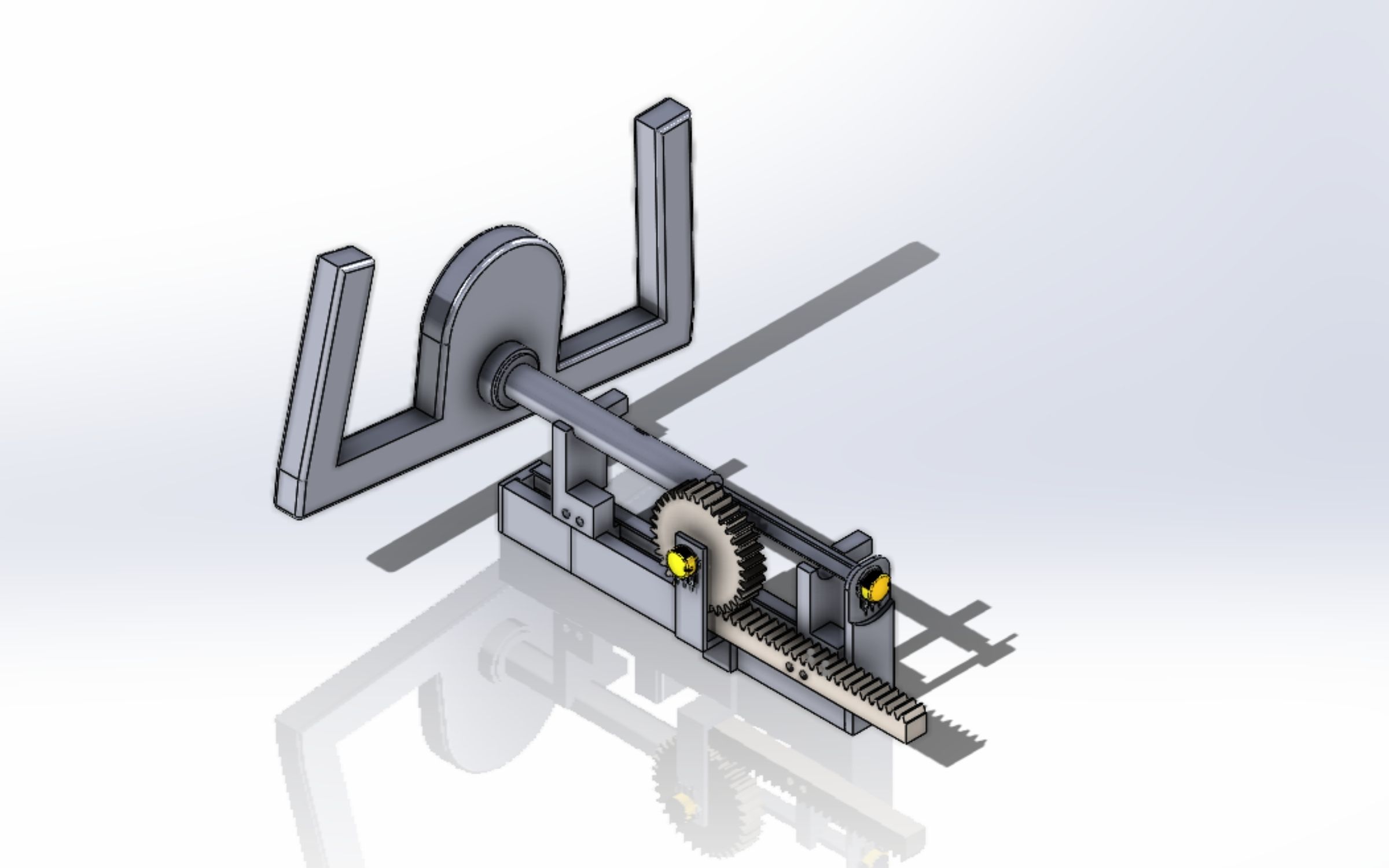
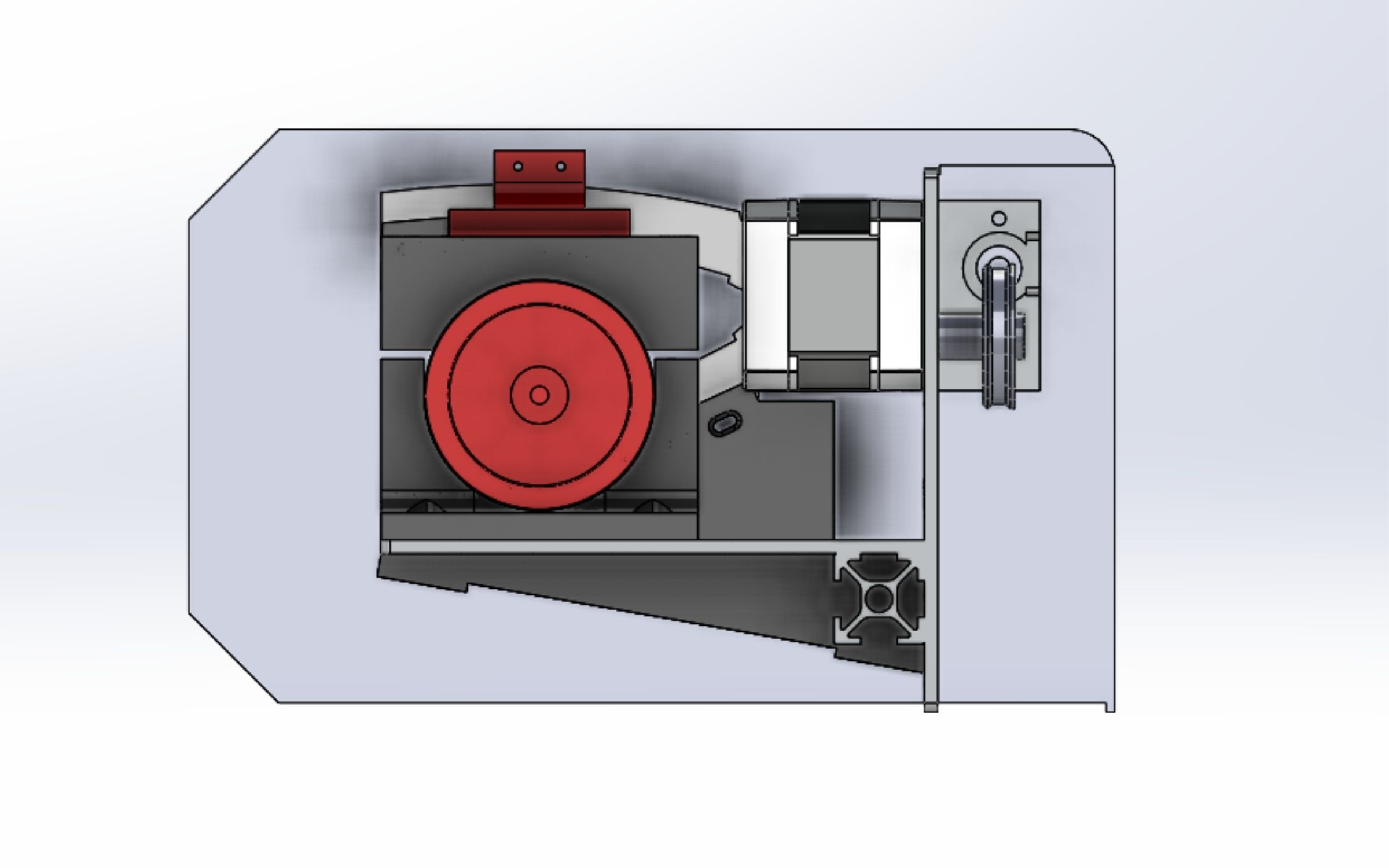
1. Structural Frame & Column Rigidity
The vertical column utilizes a heavy-duty 40x80mm Sigma Profile, providing superior
bending stiffness against the axial and lateral loads generated by the cutting tool.
The base is reinforced to ensure orthogonality (perpendicularity) between the spindle
axis and the worktable.
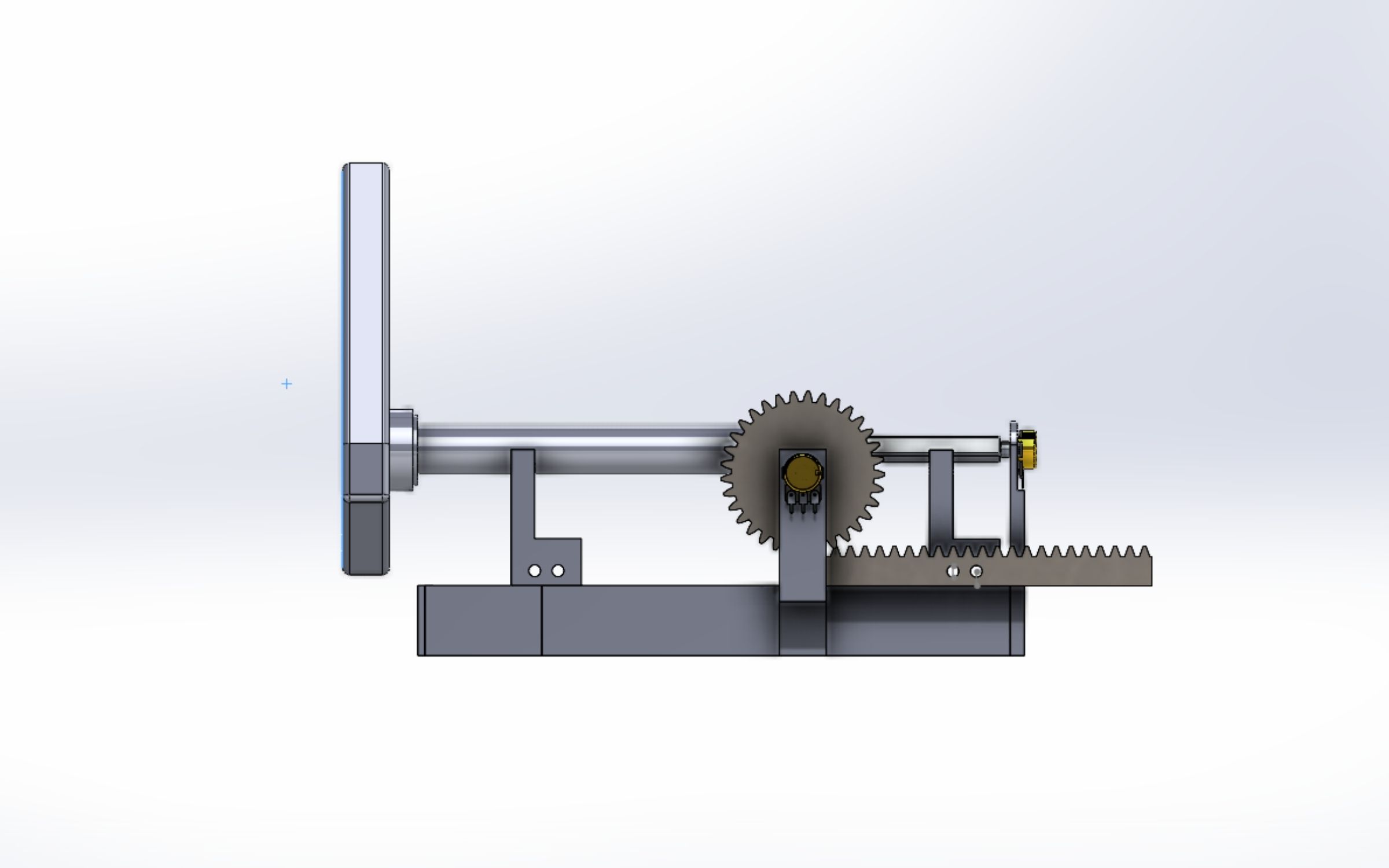
2. Precision Linear Guidance System
Vertical travel is guided by twin Hardened Chrome Shafts coupled with linear bearings.
This configuration ensures smooth, friction-minimized motion while constraining all
degrees of freedom except the Z-axis translation, critical for maintaining hole
concentricity and milling accuracy.
3. Z-Axis Transmission Mechanism
The transmission relies on a Trapezoidal Lead Screw and a mating nut. Unlike ball
screws, the friction inherent in the trapezoidal thread provides a self-locking
capability, preventing the heavy spindle head from back-driving (falling) under
gravity when power is lost.
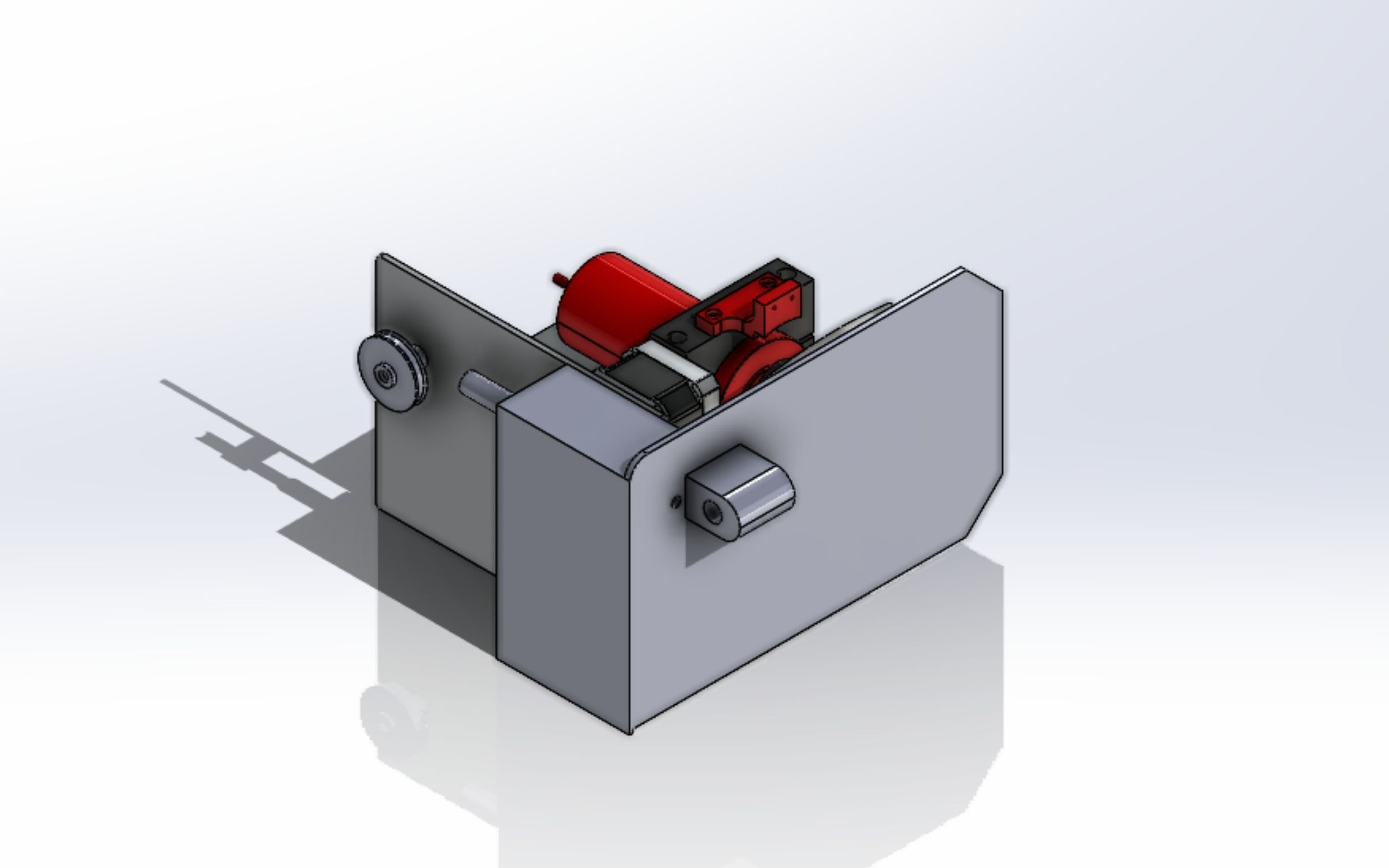
4. Spindle Mounting Unit
The Motor Clamp is designed as a split-collar fixture, allowing for the secure clamping
of cylindrical spindle motors. This component acts as the primary interface between
the machine structure and the cutting tool, designed to dampen high-frequency
vibrations during machining.
5. Hybrid Control Interface
Manual:
A top-mounted Handwheel enables the operator to perform sensitive drilling operations
(peck drilling) or fine-tune the tool height setup.
Automated:
The chassis includes a mount for a DC Motor, enabling constant feed rates for surface
milling passes, powered by a compatible supply like the AS150-48.
PROJECT DETAILS
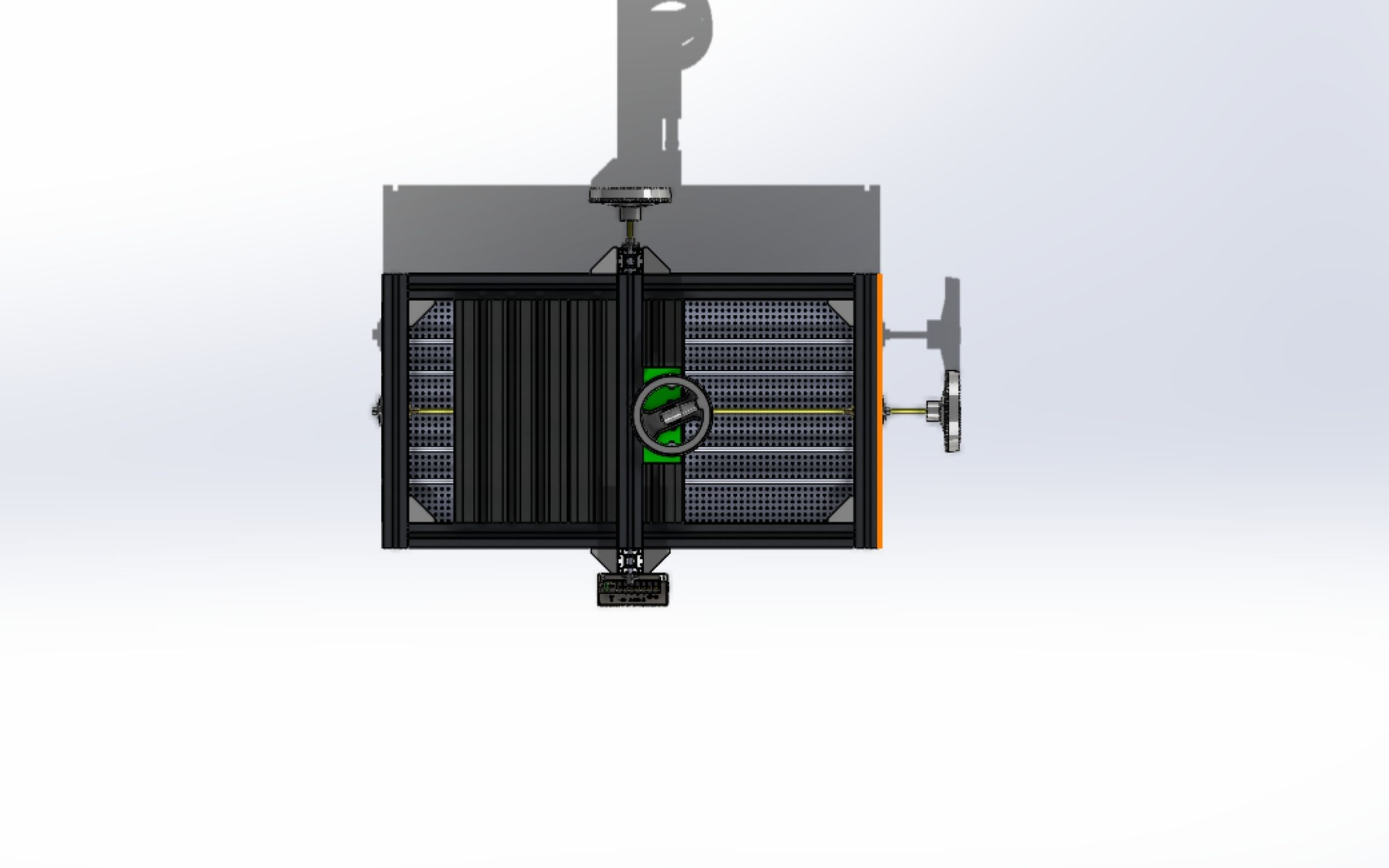
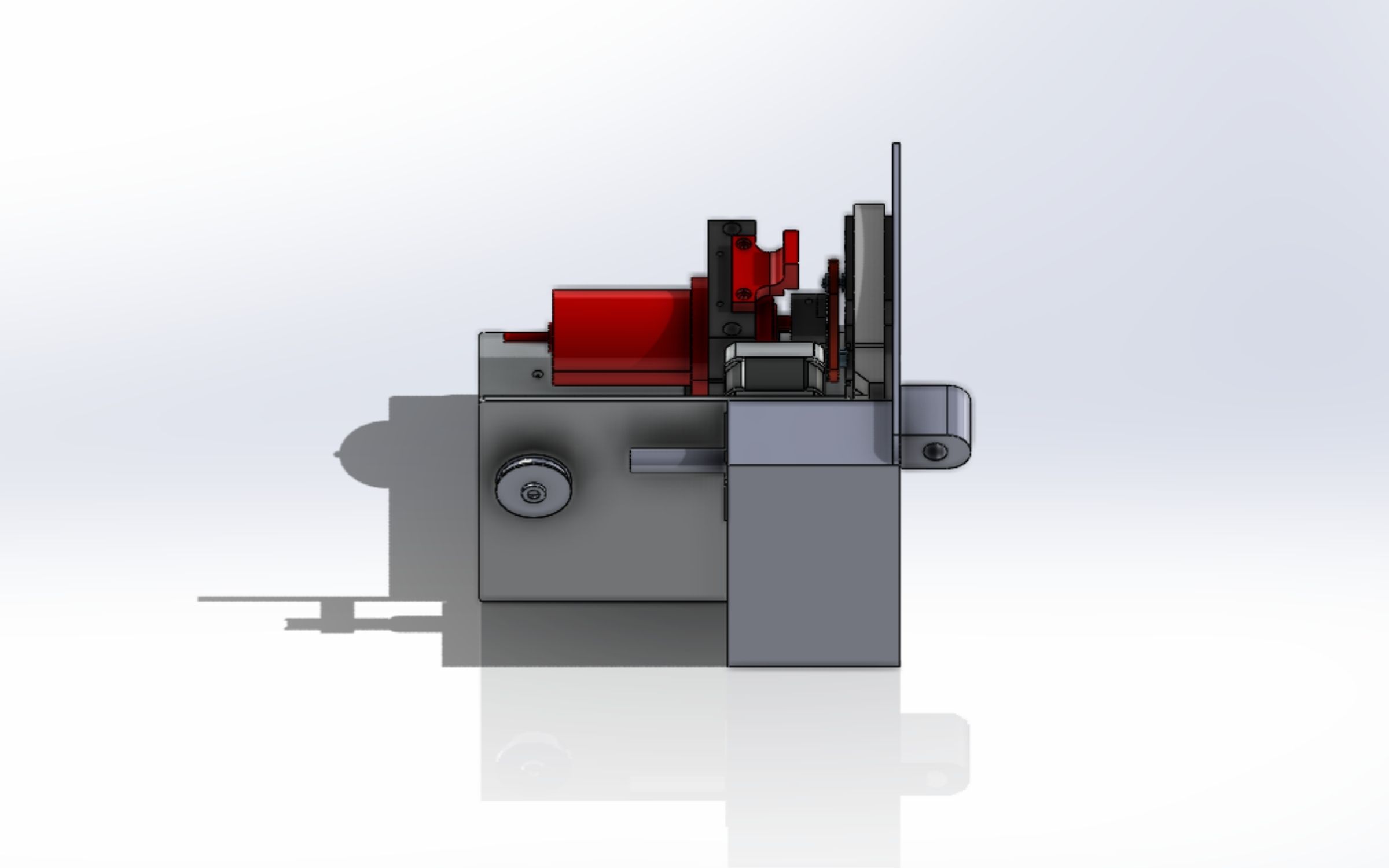
Automatic Wire Cutting Automation
Electro-Mechanical Automation System for High-Volume Cable Processing
(Step & Cam Mechanism)
Engineering Philosophy & Operational Concept
This project addresses the bottleneck of manual cable preparation in low-to-mid volume production lines.
Designed as a desktop automation unit, the system automates the
feeding, measuring, and cutting processes with high repeatability.
The core innovation lies in its Hybrid Actuation Topology, which combines the
precision of Stepper Motors for linear feeding with the high-torque characteristics of
DC Gear Motors for the cutting stroke. By integrating a custom-designed
Cam Mechanism with standard hand tools, the machine offers a unique balance between
industrial reliability and maintenance accessibility.
System Visualization
1. Kinematics & Cam Transmission
Eccentric Cam Actuation:
Unlike solenoid-based cutters which lack force, this design utilizes a high-torque DC gear
motor
driving a custom-profiled eccentric cam. This mechanism converts rotary
motion
into a powerful linear compression stroke, capable of severing thick gauge wires (up to 12
AWG)
effortlessly.
2. Precision Feeding Subsystem
Stepper-Driven Linear Feed:
The feeding mechanism is powered by a NEMA 17 Stepper Motor coupled with
high-friction polymeric rollers. This allows for digital control over wire length with
millimeter-level precision, eliminating cumulative errors common in
time-based
feeding systems.
3. Tooling & Maintainability
COTS Tool Integration (Design for Maintenance):
A key design decision was to integrate standard, high-quality side cutters
(pliers)
as the cutting element rather than a custom blade. This ensures that the "blade" can be
replaced in seconds using off-the-shelf tools, significantly reducing operational downtime
and maintenance costs.
4. Control Logic & Interface
Closed-Loop Sequence Control:
The embedded controller manages the synchronization between the feed cycle and the cut
cycle.
Inputs allow the user to define Quantity and Length
parameters,
making it a "Set and Forget" solution for batch processing.
5. Structural Design
Sheet Metal & 3D Printed Hybrid:
The chassis utilizes laser-cut sheet metal for structural rigidity where high forces are
applied
(motor mounts), combined with 3D printed guides for complex geometries (wire straighteners),
demonstrating an optimized manufacturing approach.
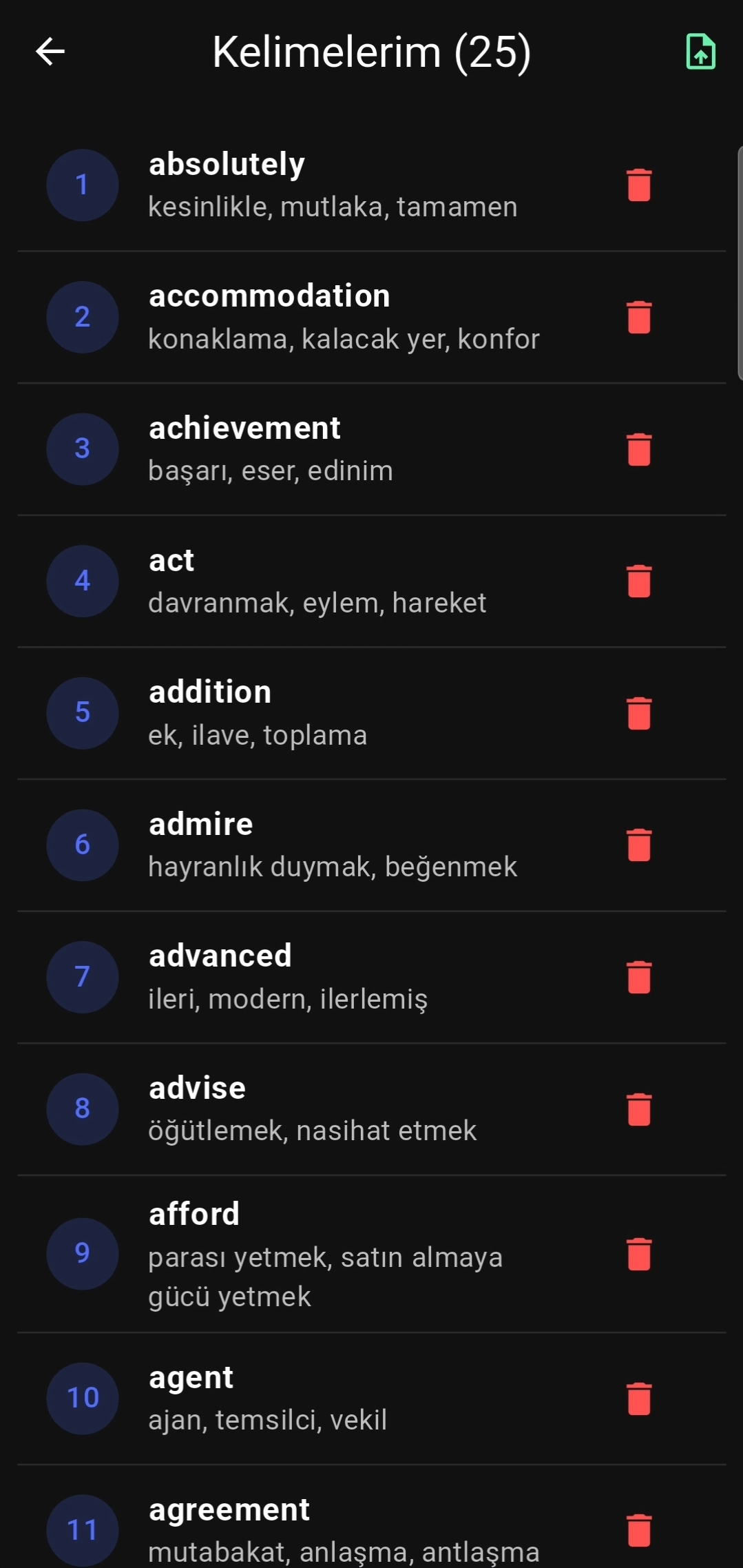
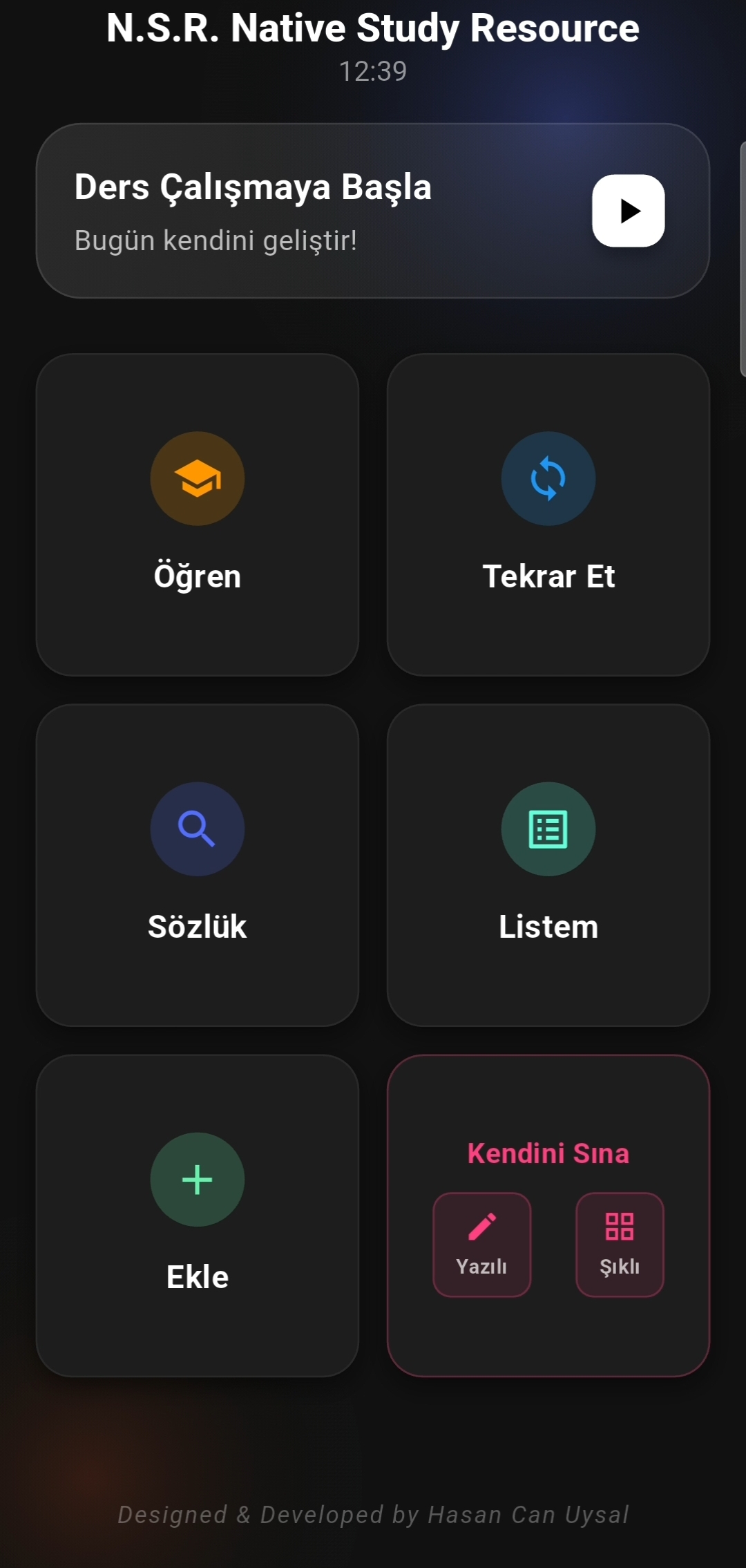
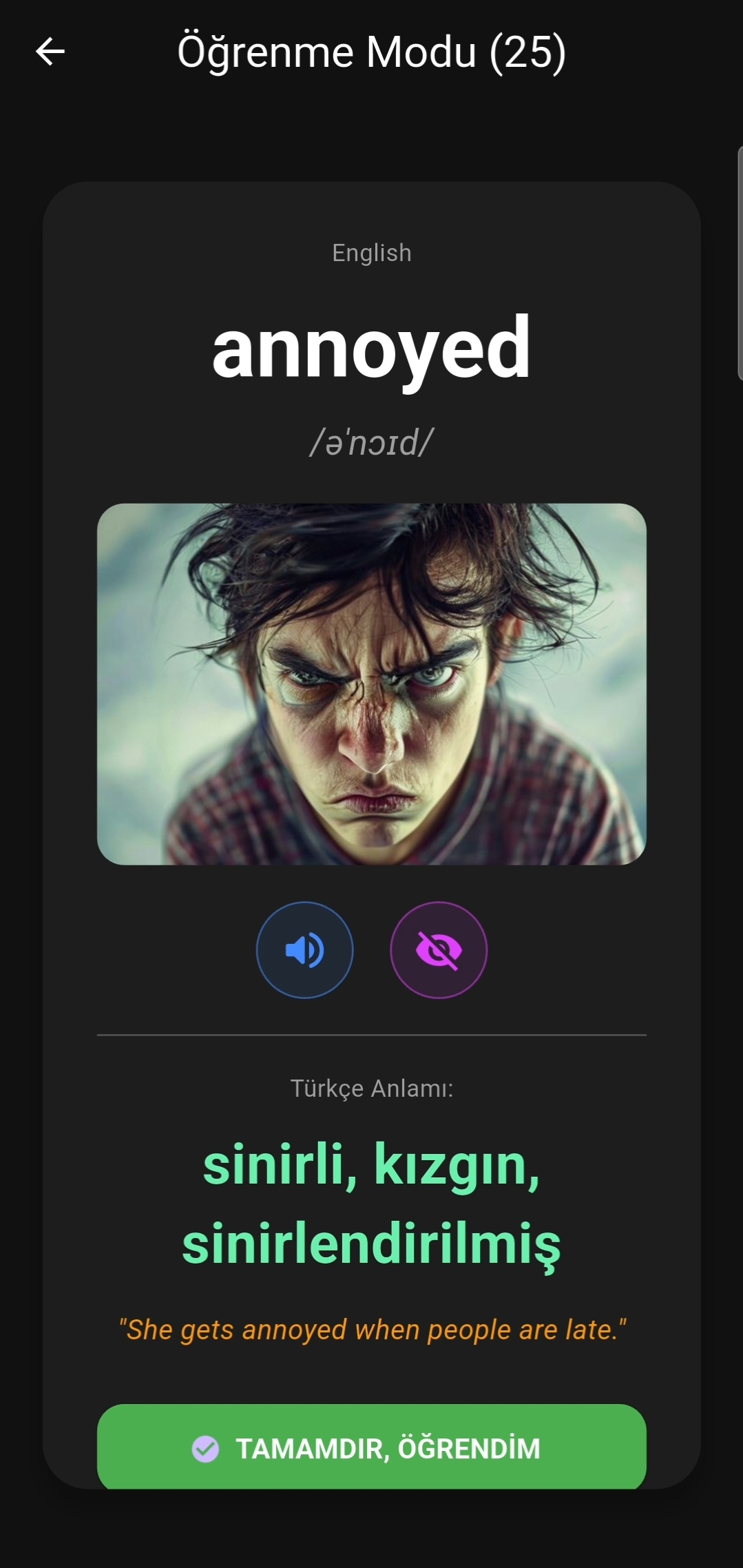
An Innovative Approach to Foreign Language Acquisition
N.S.R. (Native Study Resource)
The inception of the N.S.R. project, designed to optimize language education through technological
integration, and its dedication to my esteemed professor, Assist. Prof. Dr. Şeyda Yıldırım.
During my intensive English preparatory studies in Aerospace Engineering, I began exploring methodologies to
make the language acquisition process more effective and enduring, both for myself and my peers. The N.S.R.
(Native Study Resource) software project was developed as a direct outcome of this initiative.
Mastering a new language extends beyond vocabulary memorization and grammatical syntax; it requires
experiencing the language within its native context. N.S.R. was engineered to enhance the quality of foreign
language exposure, facilitate interactive practice, and accelerate the learning curve. Through this system,
the inherent challenges of language acquisition are mitigated, rendering the process significantly more
accessible and fluid.
The primary significance of this project, however, lies in its contribution to my academic progress rather
than its technical specifications. As an expression of my gratitude for her invaluable support during this
period, I have gifted the N.S.R. project and all associated rights to my esteemed professor, Assist. Prof.
Dr. Şeyda Yıldırım.
I am confident that this project, when integrated with her extensive expertise and pedagogical vision, will
illuminate the language learning pathways of numerous students. The foundational source code for N.S.R. is
available for review on my GitHub repository. I remain committed to developing further projects that
synergize technological capabilities with educational advancement.